Reflections (Engineering Design Common Assessment)
1. State the assignment (problem/project) in your own words.
To complete this project, we had to construct a robot that could traverse two two-inch gaps. Eventually, it had to be able to do this while carrying a cup full of legos and stop itself in time so it did not fall off the end of the table. For our final task, we had to install an ultrasonic sensor on our robot that would be able to detect a box in the way of its path.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
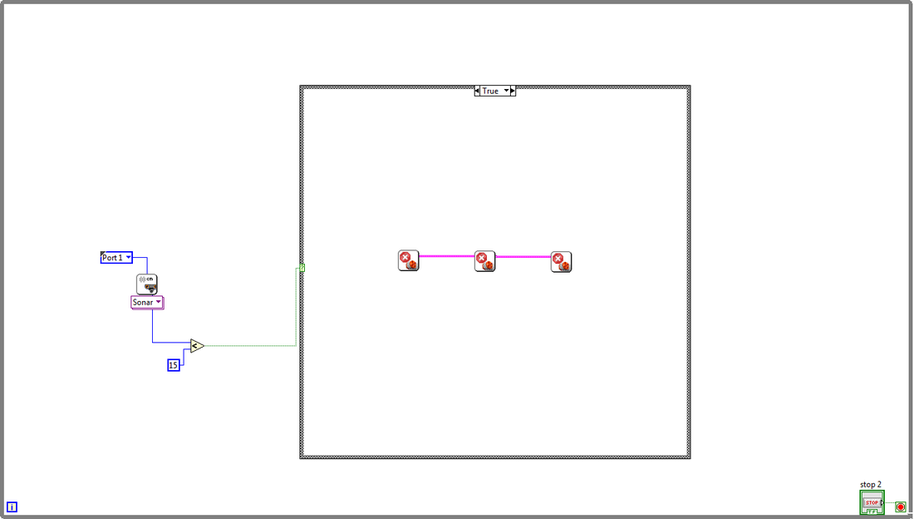
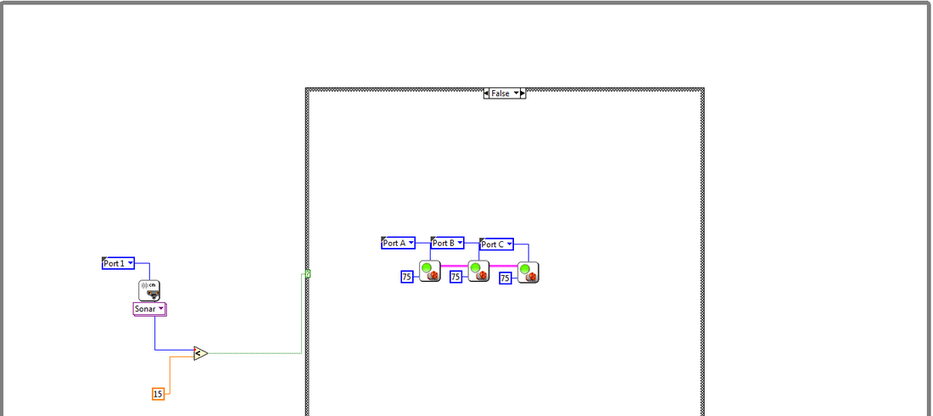
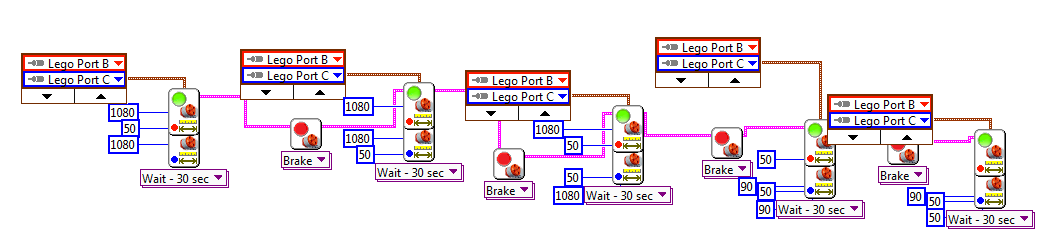
To create a robot that crossed the tables with legos, we had to calculate the amount of rotations necessary to make the robot travel a specific distance by calculating with the diameter of the tire and pi. After this was done, we installed the ultrasonic sensor using the sonar programming connected to a true/false wire loop.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
To complete this task, we constructed a robot that could travel upright with three motors. This was done by attaching three legs to the NXT piece using an assortment of legos. Eventually, it was modified with a simple program allowing it to move forward. However, to be able to eventually traverse the tables with a cup of legos .To do this, the robot had to be programmed so that it only underwent a certain amount of rotations equivalent to what's needed to reach the end of the three tables enjoined. After that, the ultrasonic senor program was installed by programming the bot to stop when a certain condition was met regarding the distance from the bot to the object in its path.
4. Describe the final output / product in detail: (what are we looking at?)
The result was a robot that could move across all three tables with legos, and also detect objects in the way so it could in time to avoid collision.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor etc.. How did you use this feedback to correct issues with your project?
For the most part, we did not get feedback from peers. Instead, we used trial and error problem-solving to construct a functional robot. However, we consulted peers and our teacher for assistance on the actual programming of our bot on occasion.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc ? ,
We learned how to program a robot that can complete simple tasks such as moving at a fixed distance in a certain direction and stop to avoid objects in its path.
7. If you were to do the project again, what would you do differently and why?
Describe one challenge in building and programming the robot.
We would not do this project differently a second time, given that our robot works well and we are satisfied with the outcome. The main challenge we had, however, was finding an acceptable design for our robot. We crafted many designs, but most of them had one small issue or another that prevented them from working properly. Through trial and error, we were able to find a design that worked best for us.
1. State the assignment (problem/project) in your own words.
To complete this project, we had to construct a robot that could traverse two two-inch gaps. Eventually, it had to be able to do this while carrying a cup full of legos and stop itself in time so it did not fall off the end of the table. For our final task, we had to install an ultrasonic sensor on our robot that would be able to detect a box in the way of its path.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
To create a robot that crossed the tables with legos, we had to calculate the amount of rotations necessary to make the robot travel a specific distance by calculating with the diameter of the tire and pi. After this was done, we installed the ultrasonic sensor using the sonar programming connected to a true/false wire loop.
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
To complete this task, we constructed a robot that could travel upright with three motors. This was done by attaching three legs to the NXT piece using an assortment of legos. Eventually, it was modified with a simple program allowing it to move forward. However, to be able to eventually traverse the tables with a cup of legos .To do this, the robot had to be programmed so that it only underwent a certain amount of rotations equivalent to what's needed to reach the end of the three tables enjoined. After that, the ultrasonic senor program was installed by programming the bot to stop when a certain condition was met regarding the distance from the bot to the object in its path.
4. Describe the final output / product in detail: (what are we looking at?)
The result was a robot that could move across all three tables with legos, and also detect objects in the way so it could in time to avoid collision.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor etc.. How did you use this feedback to correct issues with your project?
For the most part, we did not get feedback from peers. Instead, we used trial and error problem-solving to construct a functional robot. However, we consulted peers and our teacher for assistance on the actual programming of our bot on occasion.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc ? ,
We learned how to program a robot that can complete simple tasks such as moving at a fixed distance in a certain direction and stop to avoid objects in its path.
7. If you were to do the project again, what would you do differently and why?
Describe one challenge in building and programming the robot.
We would not do this project differently a second time, given that our robot works well and we are satisfied with the outcome. The main challenge we had, however, was finding an acceptable design for our robot. We crafted many designs, but most of them had one small issue or another that prevented them from working properly. Through trial and error, we were able to find a design that worked best for us.

Line Follower Project
Tug of War
Sumo Powerpoint
Maze Program
